
Theoretical Research on Autonomous Vehicles Based on ROS2
Theoretical Research on Autonomous Vehicles Based on ROS2 September 2022 – January 2023
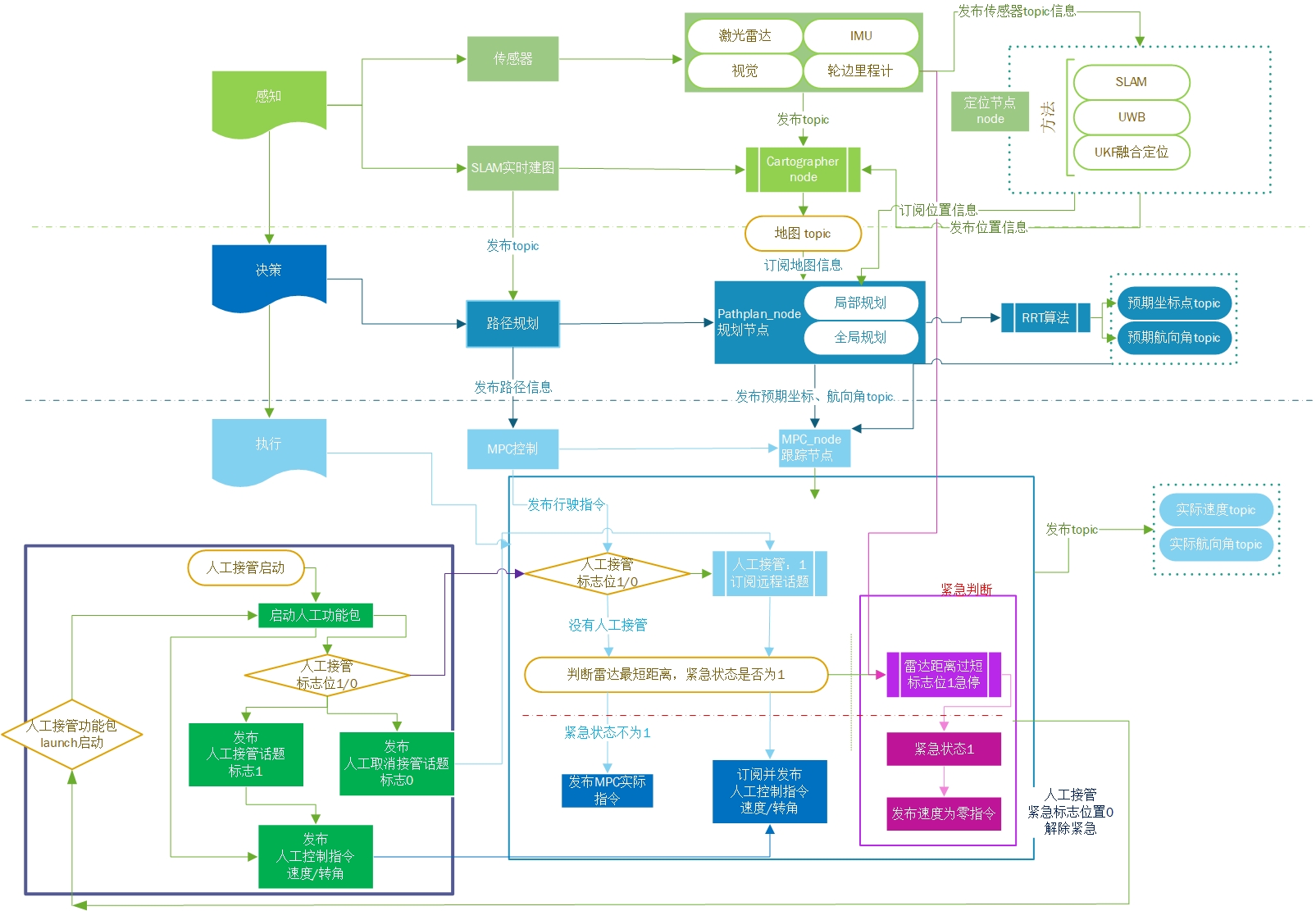
-1. System Development: Built perception, localization, path planning, and MPC tracking nodes on ROS2 with Ubuntu 22.04.
-2. Node Design: Implemented publish-subscribe topics in C++, simulated and debugged in the Gazebo environment.
-3. Path Planning: Applied RRT for pathfinding and MPC for control, incorporating SLAM for mapping.