
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Multi-agent Reinforcement Learning-Based Fleet Dispatching
By integrating the Deep Q-Network, a model-free reinforcement learning system, with the dynamic programming optimization method, the efficiency of mining operations can be enhanced, thereby reducing waiting times and energy consumption.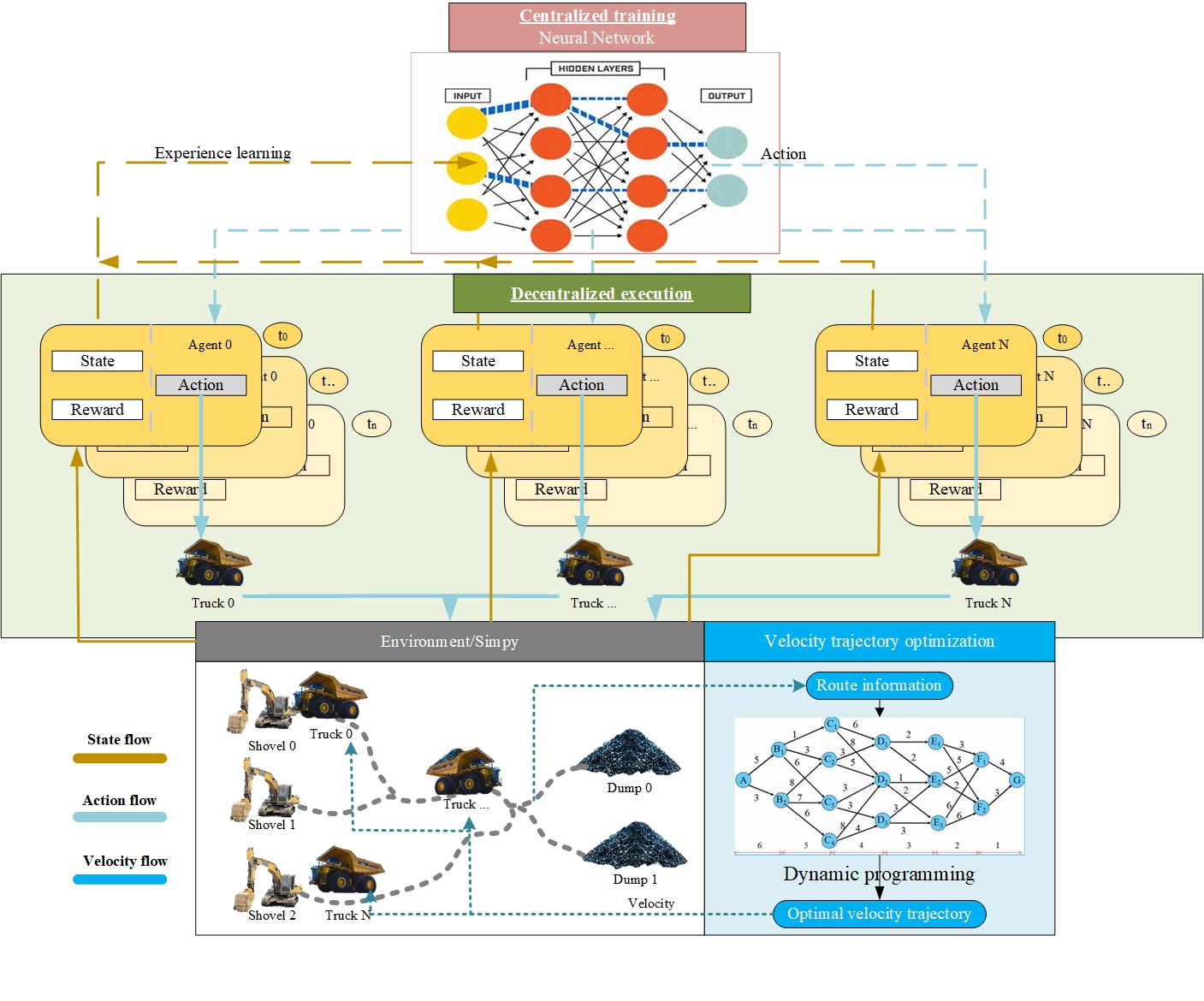
The Electric Autonomous Truck Without Cabin
Dispatched 10 homogeneous autonomous vehicles in a closed mining area by using the intelligent system in real time. Enhanced the full-time autonomous operation capability to reach more than 120% of the manual by EV trucks.
Multi-objective Optimization of Vehicle Speed and Trajectory
A multi-objective speed trajectory optimization method using dynamic programming was proposed considering travel time, energy consumption, and battery lifetime. And it is verified on the fuel and electric vehicle models.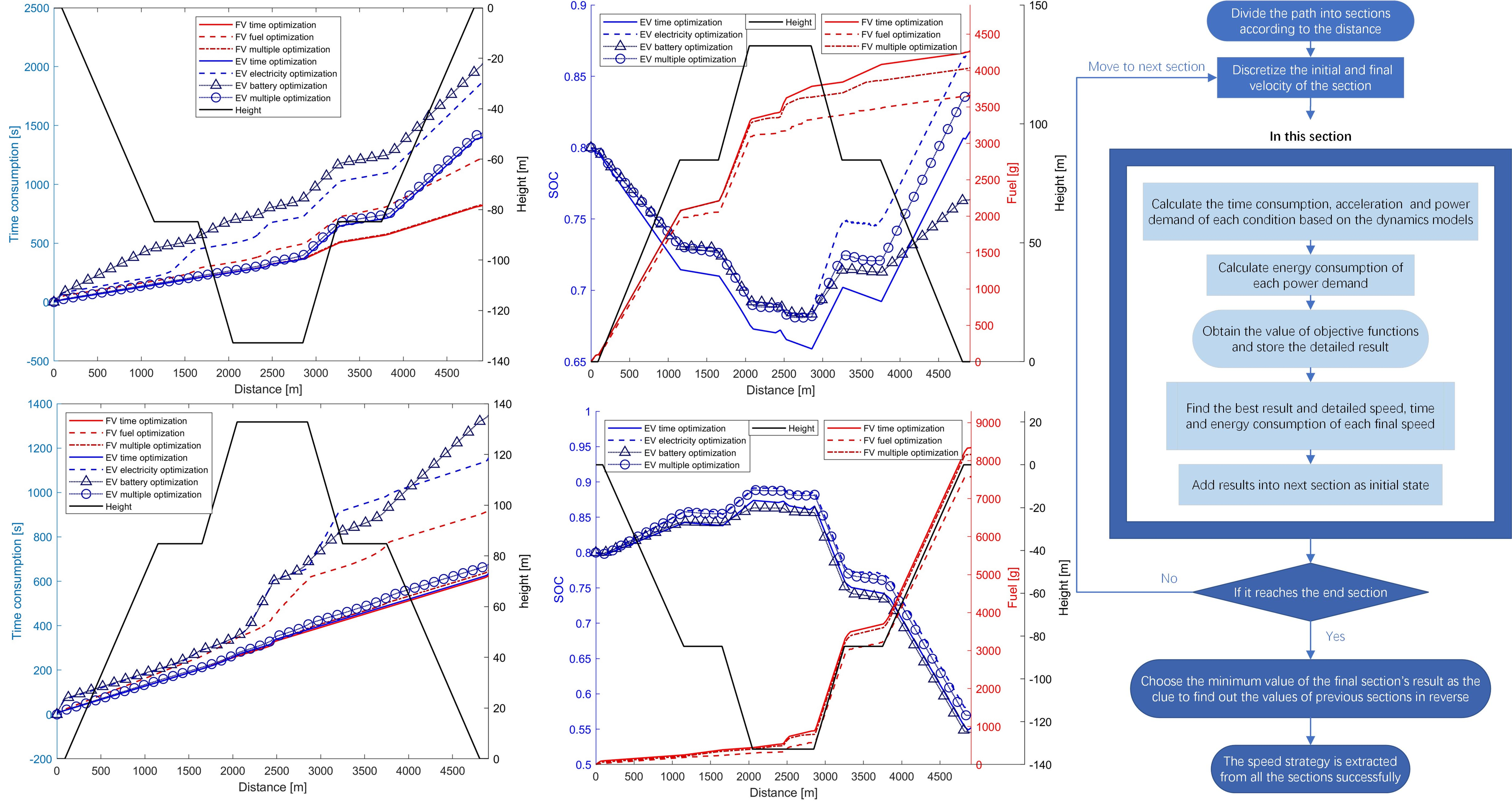
Theoretical Research on Autonomous Vehicles Based on ROS2
Based on ROS2 in the Ubuntu22.04 system, built nodes for perception, localization, path planning, and MPC tracking.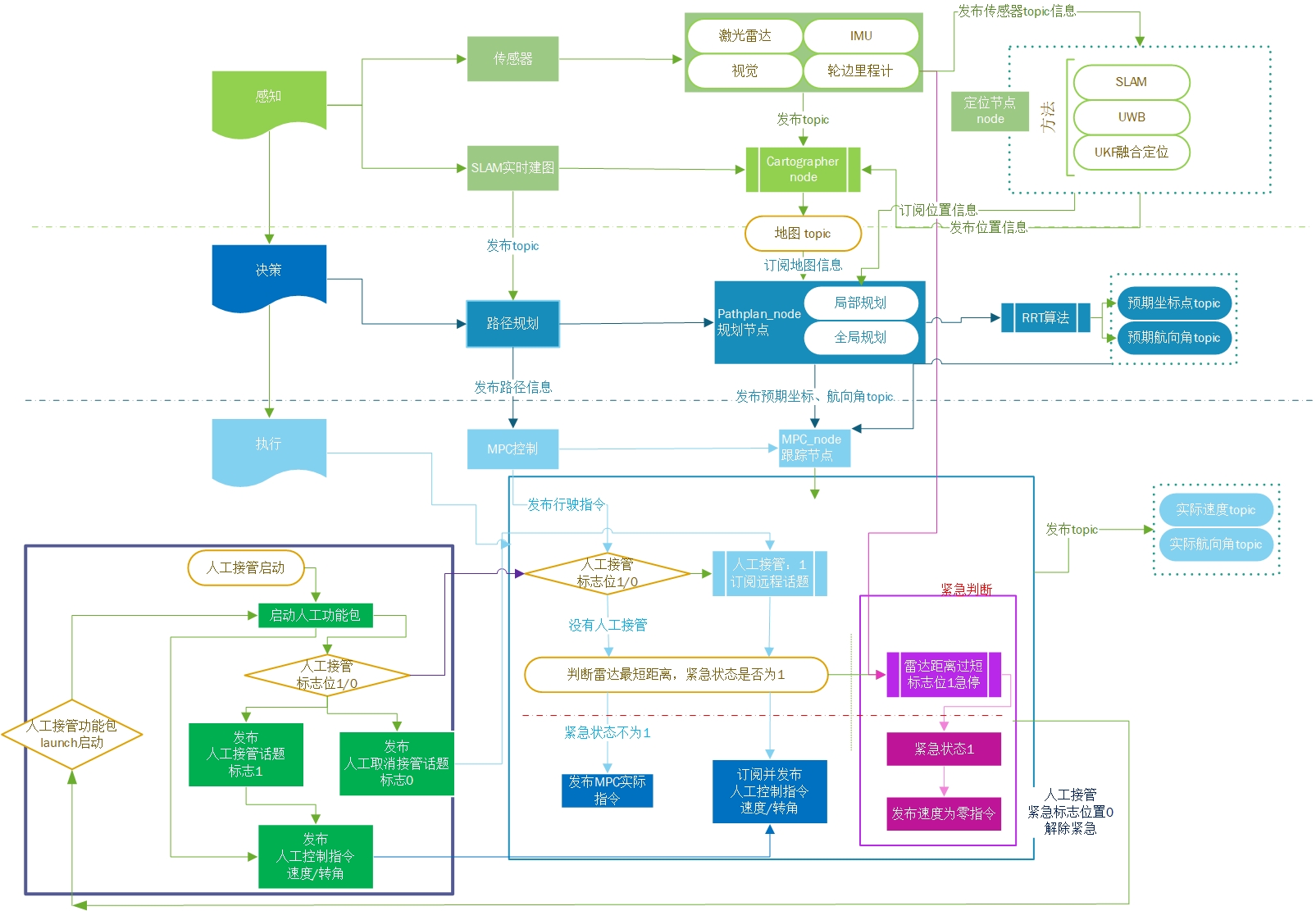
publications
A Multi-Objective Velocity Trajectory Optimization Method for Autonomous Mining Vehicles
Published in International Journal of Automotive Technology, 2023
Autonomous mining transportation is an intelligent traffic control system that can provide better economics than traditional transportation systems. The velocity trajectory of a manned vehicle depends on the driver’s driving style. Still, it can be optimized utilizing mathematical methods under autonomous driving conditions. This paper takes fuel and electric mining vehicles with a load capacity of 50 tons as the subject. It contributes a multi-objective optimization approach considering time, energy consumption, and battery lifetime. The dynamic programming (DP) algorithm is used to solve the optimal velocity trajectory with different optimization objectives under two types of mining condition simulation. The trajectories optimized by the single objective, energy consumption, usually adopt the pulse-and-gliding (PnG) approach frequently, which causes the battery capacity loss and increases the travel time. Hence, a multi-objective optimization approach is proposed. For electric vehicles, trajectories optimized by the multi-objective approach can decrease the battery capacity loss by 22.01 % and the time consumption by 41.28 %, leading to a 42.12 % increment in energy consumption. For fuel vehicles, it can decrease the time consumption by 32.54 %, leading to a 7.68 % increment in energy consumption. This velocity trajectory is smoother with less fluctuation. It can better meet the requirements of mining transportation and has a particular reference value for optimizing autonomous transportation costs in closed areas.
Recommended citation: Pei, S., Yang, J. Multi-objective Velocity Trajectory Optimization Method for Autonomous Mining Vehicles. Int.J Automot. Technol. 24, 1627–1641 (2023). https://doi.org/10.1007/s12239-023-0131-5
Download Paper
Under review: Multi-agent Deep Reinforcement Learning to Improve Dispatch System for Autonomous Trucks
Published in Journal of Intelligent Transportation Systems, 2024
In the domain of mining transportation, conventional scheduling and human controlled approaches often result in diminished efficiency and suboptimal outcomes, encompassing resource wastage, increased energy consumption, and safety risks. Byintegrating Deep Q-Network (DQN), a model-free reinforcement learning (RL) system, with the dynamic programming trajectory optimization method, the efficiency of mining transportation can be enhanced, thereby reducing waiting times and energy consumption. The proposed approach seeks to enhance the fleet’s decision making capabilities pertaining to payload management, queueing duration, and the quantity of trucks in the waiting queue. The approach is valid in the simulator several times. It results in better performance compared to the conventional fixed schedule (FS) and shortest queuing (SQ) strategy. The dispatching policy generated by the DQN algorithm demonstrates more balanced tasks between dump sites and shovel sites. It shows robustness in handling unplanned truck failures.
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Midea Group Co., Ltd.
Intern in Lean Management, Air-Conditioner Group, 2020

German Association of the Automotive Industry
Intern in China Office, China Office, 2020

China National Heavy Duty Truck Group Co., Ltd.
Intern in Light Truck, Light Truck, 2022

National Innovation Center of Intelligent and Connected Vehicles
Intern in Industry Analyst, Industry Analyst, 2024
